
FPS矩阵原理
FPS矩阵原理
参考文章: FPS通用的方框透视公式的原理_fps透视原理-CSDN博客
FPS游戏方框透视基本原理_fps 透视矩阵算法-CSDN博客
之前我们做的非矩阵画线,位置不准确,还很难进行缩放
但是下图是矩阵的效果,看上去就非常的好

游戏坐标转换原理:
游戏中通过建模完成的3D物体要想在2D屏幕上显示出来需要进行坐标的转换。
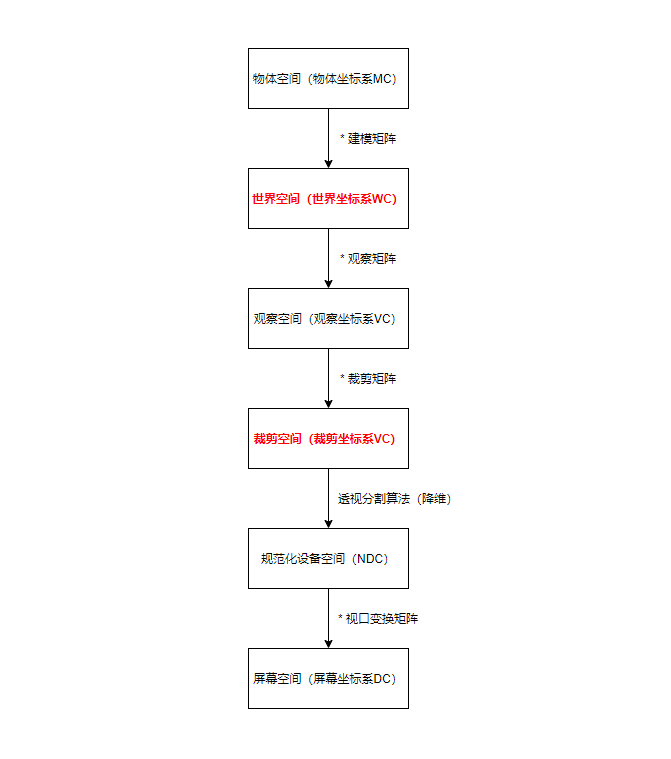
具体过程看 FPS游戏方框透视基本原理_fps 透视矩阵算法-CSDN博客 吧(看得我十分头大,不过我们只需要大概了解即可)
按照上面的原理,我们只要找到人物在世界坐标系中的坐标 (x1,y1,z1) ,就可以在屏幕上画出人物边框
第一步:世界坐标 -> 裁剪坐标
z1后面的那个1是w,为了兼容4*4矩阵
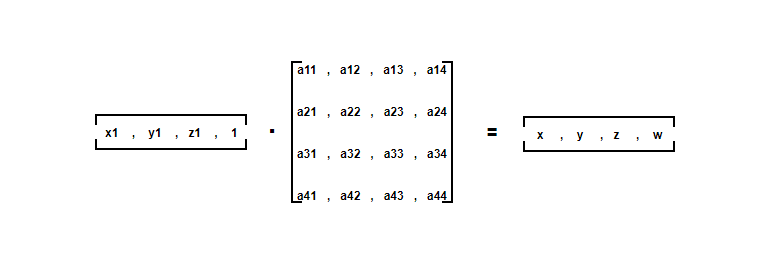
1 | X = a11*x1 + a12*y1 + a13*z1 + a14 |
裁剪坐标 —-> NDC坐标
NDC坐标就是将裁剪坐标对应的xyz除以w,这就是透视分割算法(降维)。
1 | NDC_X = X / W |
NDC坐标 —-> 屏幕坐标
这需要一个视口变换矩阵,视口变换矩阵左乘NDC坐标就会得到对应的屏幕坐标。其中视口变换矩阵中fs和ns一般为0。
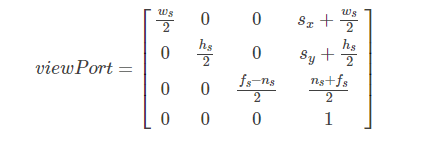
最后得到屏幕坐标的X = (Ws / 2 * NDC.x) + (NDC.x + Ws / 2), Y = -(Hs / 2 * NDC.y) + (NDC.y + Hs / 2)。而Ws * Hs为当前屏幕窗口的分辨率,且注意在windows中屏幕坐标系的规则
我们需要找什么矩阵
在开发FPS游戏的辅助工具(俗称“外挂”)时,“找矩阵”通常指的是找到与游戏中物体或玩家视角相关的变换矩阵。这些矩阵可以是Direct3D(D3D)或OpenGL中用于渲染场景的矩阵。
D3D矩阵和OpenGL矩阵 包括了用于计算相机视角的所有变换矩阵:
世界矩阵(World Matrix):将物体从局部坐标系转换到世界坐标系。
视图矩阵(View Matrix):将世界坐标系转换到相机坐标系。
投影矩阵(Projection Matrix):将相机坐标系转换到屏幕坐标系,并决定了FOV。
其实我们要找的就是相机FOV的矩阵,然后这个矩阵是通过D3D矩阵或openGL矩阵将一个坐标矩阵变换而来,最终得到一个相机FOV的矩阵
其中:
D3D矩阵 是行主序
1 | a00, a01, a02, a03, |
openGL矩阵 是列主序
1 | a00, a10, a20, a30, |
介绍找到的矩阵特性:
缩放和位移矩阵:
1 | Sx 0 0 Tx |
这样,一个坐标矩阵
(
x
y
z
w
)
乘上这个坐标矩阵之后就会得到
(
Sx * x + Tx * w
Sy * y + Ty * w
Sz * z + Tz * w
Tw*w
)
)
缩小放大S倍,移动就用T * w表示
在FPS游戏中,角色的运动如走路、跳跃等,实际上会引起摄像机视点的变化。这个变化体现在位置的变换上,而位置的变换就体现在矩阵的最后一列。
结论1
所以得出结论:
行主序的最后一列,列主序的最后一行,在走路 跳的时候会改变(不代表其他动作不改变)
注意注意,貌似单纯跳,直走之后改变三个值,但是如果混合运动,就会四个值一起改变,这个也可以作为特征
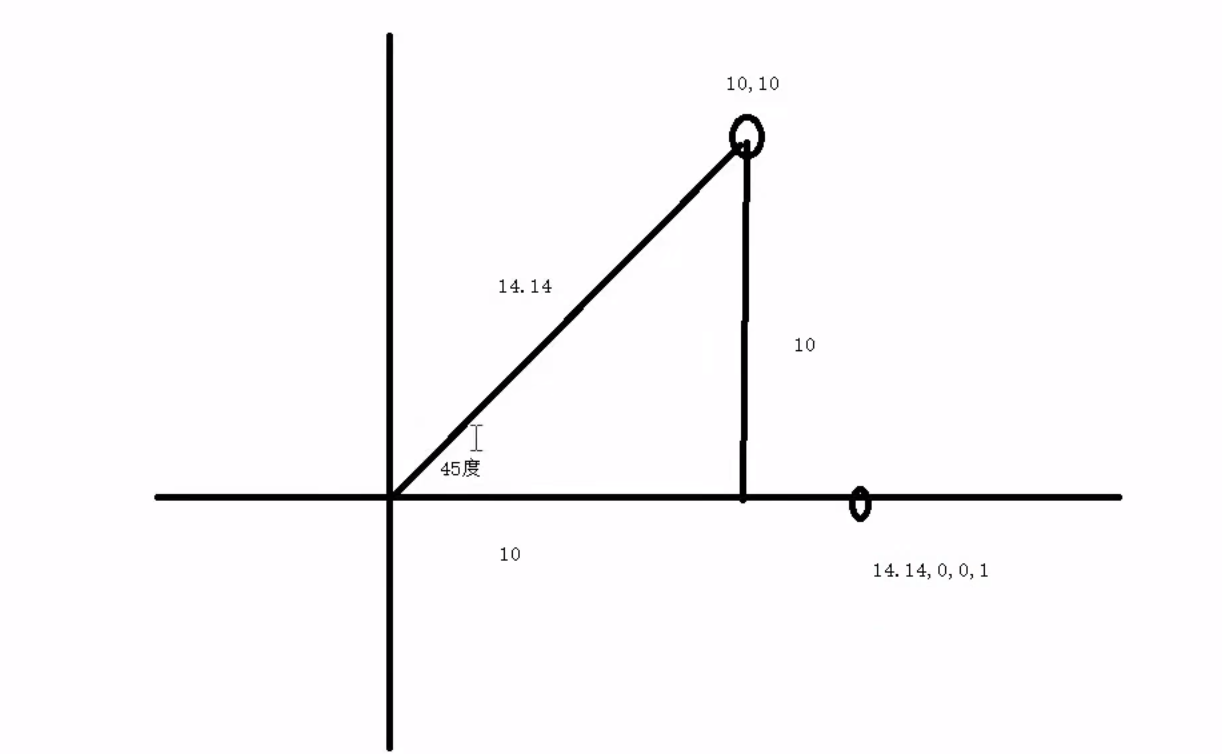
旋转矩阵:
注意一下,以下说的xyz轴,都是以人物建立坐标系,不是世界坐标系
这是在xyz坐标系中的xy平面进行旋转,也就是绕着z轴旋转
1 | cosA -sinA 0 0 |
乘上 坐标列矩阵
(
x
y
z
w
) (右乘)
可以得到:
(
cosA * x - sinA * y
sinA * x +cosA * y
z
w
)
例如下面的转换
同理还有绕着x轴,y轴旋转
那么旋转矩阵就变为
1 | //绕x轴旋转 |
结论2
因此我们又得出一个结论:
在水平转动的情况下,也就是绕着Z轴旋转,行主序的第三列不变,列主序的第三行不变
同理
结论3:
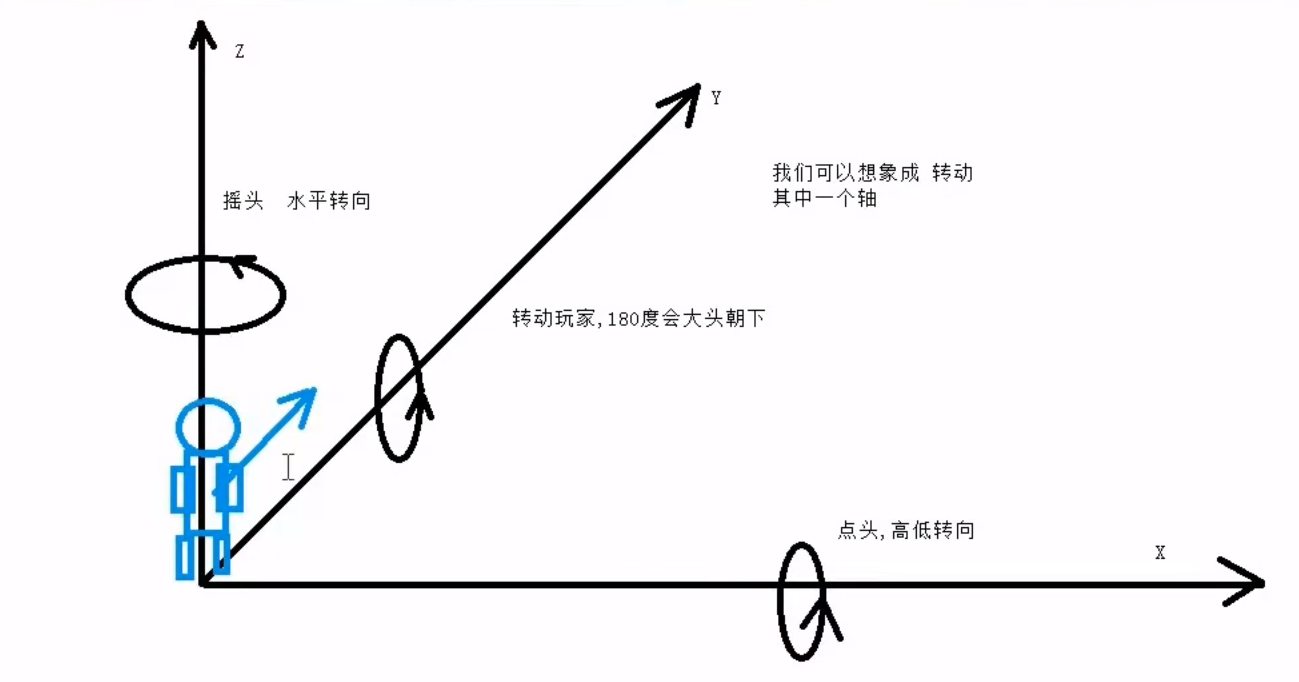
在高低朝向改变的时候,其实就是绕着x轴进行旋转
所以结论:
高低朝向改变的时候,行主序的第一行不变,列主序的第一列不变
其他结论:
很多的FPS游戏的规律:矩阵4*4的第一个值是-1到1,这是和引擎的特性有关(不一定)
行主序的第一行第三个元素是固定的0,列主序的第一列的第三个元素是0 (可能也不一定)
开倍镜的情况下,矩阵4*4的第一个值会乘相应的倍数(大概率对)
合集:
- 行主序的最后一列,列主序的最后一行,在走路 跳的时候会改变(不代表其他动作不改变)
- 在水平转动的情况下,也就是绕着Z轴旋转,行主序的第三列不变,列主序的第三行不变
- 高低朝向改变的时候,行主序的第一行不变,列主序的第一列不变
- 很多的FPS游戏的规律:矩阵4*4的第一个值是-1到1,这是和引擎的特性有关(不一定)
- 行主序的第一行第三个元素是固定的0,列主序的第一列的第三个元素是0 (可能也不一定)
- 开倍镜的情况下,矩阵4*4的第一个值会乘相应的倍数(大概率对)
找矩阵实践:
先说结论:
1 | cstrike.exe+1820100 //矩阵基地址 |
其实就是应用上述的结论,主要是结论1 结论2 结论3和最后一个开镜矩阵的第一个值会放大
值得注意的是,一开始我咋也找不着,因为我直接根据开镜第一个值就变大,不开镜就变小的结论去找
但是我忽略了一点,就是第一个值有可能是一个负数,这样开镜的话,乘以一个倍数就会变得更小,但是我仍然按照增大的值去搜,导致一无所获,这也算是学了个教训吧
还有其他技巧,就是原地跳,那么结论1的第一个值是不会变的,还有改朝向,只要是人物朝向和世界坐标的x y轴重合,那么直走的时候,结论1的第一个值也是不会变的
坐标转换:
世界坐标->剪辑坐标
拿世界坐标矩阵
1 | x y z w |
去乘以我们刚刚找到的矩阵
1 | a0 a1 a2 a3 |
得到结果:
1 | 剪辑坐标x=a0*x+a4*y+a8*z+a12*w |
此时将世界坐标转换为了二维平面的坐标,但是和设备的分辨率没啥关系,需要进一步变换
剪辑坐标->NDC坐标:
1 | NDC.x = 剪辑坐标x/剪辑坐标w |
把剪辑坐标变成范围限定在-1~1
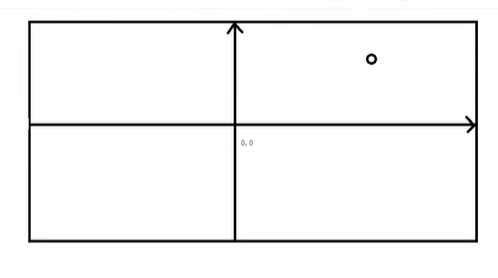
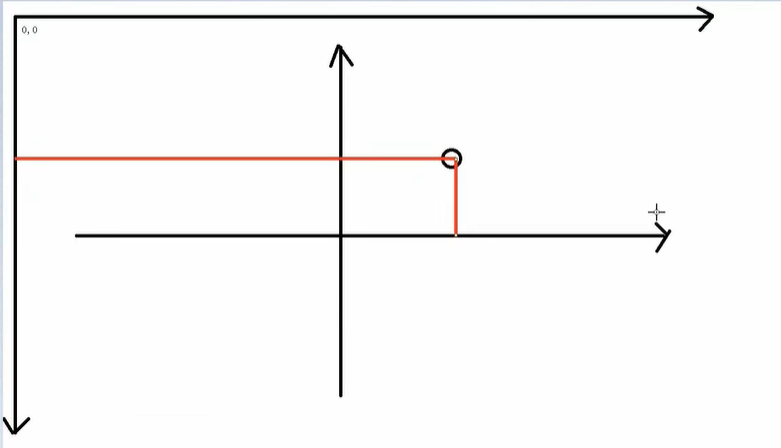
NDC坐标->屏幕坐标:
1 | NDC.x/1=屏幕坐标差.x / (分辨率_宽/2) |
所以我们可以推出来:
1 | 屏幕坐标.x = 屏幕坐标差.x + 分辨率_宽/2 |
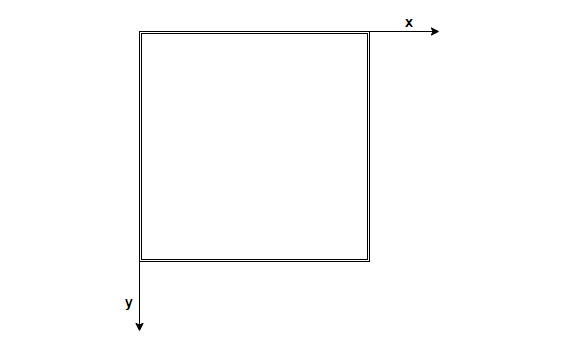
额外加一个 分辨率 _ 宽/ 2 , 分辨率_高/2 是因为NDC坐标原点在屏幕中心
还有在NDC坐标系中,一二象限的y是正值,三四象限是负值,但是我们的屏幕坐标从上到下是增加的。所以我们需要自己加一个负号
世界坐标转为屏幕坐标代码实现:
1 | bool 绘制::世界坐标转为屏幕坐标_矩阵(对象结构 目标对象结构, 屏幕坐标结构& 目标屏幕坐标结构) |